教育在線
教育在線



北京大學工學院先進制造與機器人系王啟寧教授課題組在智能動力下肢假肢方面取得重要突破,提出一種受馬尾草啟發的折紙軟體動力膝關節假肢,這是國際首款軟體膝關節假肢。研究為下肢假肢的設計提供了全新的思路,研究成果以“Bioinspired Origami-based Soft Prosthetic Knee”為題,于近日發表在國際重要期刊Nature Communications上。該論文的第一作者為北京大學工學院博士生高思源,王啟寧教授為唯一通訊作者。


膝關節假肢設計的主要目標是既滿足殘疾人日常基本的行動功能需求,如在平地、崎嶇路面、樓梯、斜坡上行走等功能,又保證用戶穿戴的舒適性,具備如輕便、仿生、減震、以及定制化等特性。目前,膝關節假肢都是剛性假肢,采用高密度的金屬材料制成,且各部分功能機構相對獨立,在提高功能性的同時會增大系統體積、重量,且剛性框架的緩沖性能也十分有限,很難兼顧功能性和舒適性。近年來,軟體材料的高度發展有望為機器人領域提供創新的解決方案和功能上的增強。其固有的低密度、柔順性、緩沖性和便于3D 打印的特性使軟體機器人具備輕便、柔順、減震、便于制造等特點,這十分契合膝關節假肢對于穿戴舒適性的設計要求。然而,軟體材料的高柔順性也導致其結構在運動和承重時會產生無法避免的非必要形變,這一方面不利于建模計算和運動控制,另一方面導致結構難以承受人體重量,阻礙了軟體機器人在膝關節假肢上的應用。
首次提出基于折紙的仿生軟體膝關節假肢
本研究首次提出了基于折紙的仿生軟體膝關節假肢,如圖1所示,假肢包含了折紙結構、表面加固塊、大腿、小腿連接模塊。所提出軟體假肢主體由熱塑性聚氨酯3D打印制成,膝關節單元重量僅有300g,假肢高度僅為15cm。折紙結構由正面折紙結構和背面折紙結構組合而成。利用折紙結構的大范圍折展特性,可以滿足膝關節大范圍運動的要求。
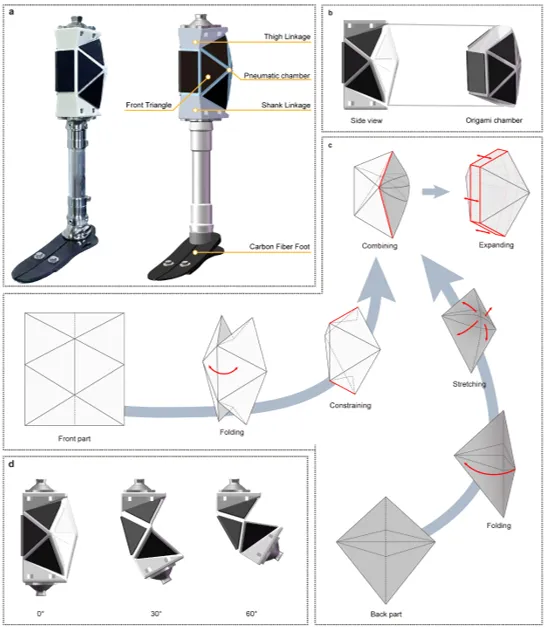
圖1. 折紙軟體膝關節總覽
仿生多中心折紙膝關節設計
本研究提出一種具有變轉動中心性質的折紙結構,如圖2所示,其中虛線為谷線,實線為山線,紅色虛線為輔助線。沿山線和谷線折疊,并使A1B 和A2B、D1C 和D2C 分別重合,即可形成如圖2(b)所示的3D 折紙結構。
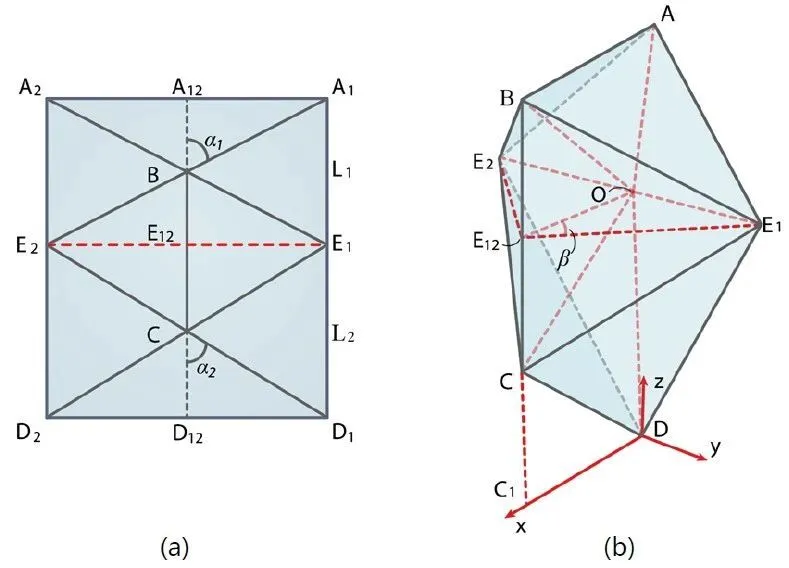
圖2. 正面折紙結構折痕設計圖
其中,AB和CD分別定義為大腿桿和小腿桿,L1、L2、α1、α2、β 均為折痕設計參數,通過改變這幾個參數,可以調整折紙構型以及結構上、下部分的不對稱度,如圖3所示。該不對稱度影響著折紙膝關節的屈膝角度變化、最大屈膝角度、以及膝關節轉動瞬心的曲線樣貌,通過調整這些設計參數擬合人體膝關節轉動中心,即可實現仿人的膝關節多中心轉動。
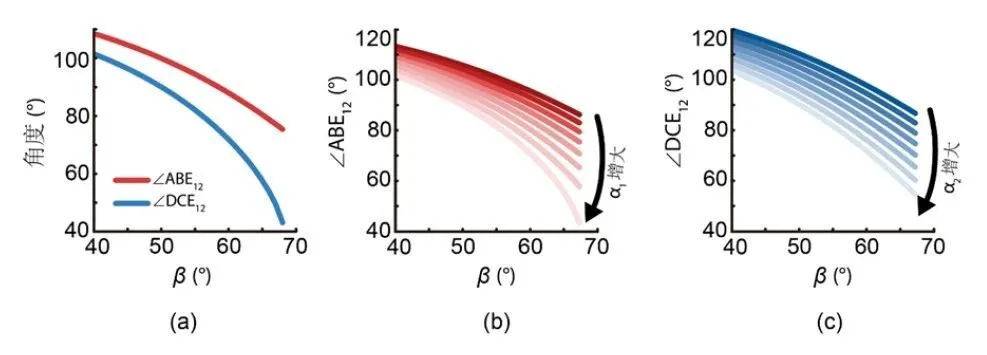
圖3. ABE12及DCE12在3D折紙結構折展過程中的變化與α1、α2、β 的關系
仿馬尾草抗彎折機制的軟體結構設計
馬尾草是一種常見的具有管狀結構的植物,這種植物有些可以長到5米高,但是只有2厘米粗,如圖4所示,通過對其莖的截斷面進行觀察,可以看到一個由薄的外環強化組織和更厚的內環軟組織組成的結構,在馬尾草被彎折的時候,外環形成的管狀結構受擠壓,使得內部軟組織細胞內壓上升,從而提高結構剛度抵抗彎折。進一步觀察可以發現,在髓腔生長過程中,管狀結構內壁上會形成褶皺結構,在結構應力最集中的部位,褶皺處會進一步凹陷,擠壓局部細胞,使細胞內壓進一步上升,從而提高局部結構強度。由此,本研究總結出馬尾草抗彎折的兩大關鍵機制,即流體壓制穩定和受壓內凹結構。
為了模仿馬尾草抗彎折的機制,提高軟體結構的承重能力,本研究設計了背面折紙結構,與正面折紙結構共同組成一個軟體氣動腔體,利用氣腔氣壓模擬馬尾草的細胞液壓。通過調整正面和背面的折痕相對于壓力方向的夾角,使正面折紙結構在承受壓力時相對剛度更大,來模仿馬尾草中外環強化組織的作用。隨著氣腔內氣壓的上升,軟體折紙結構的整體剛度提升,從而抵抗外部壓力,維持結構穩定。通過對氣腔預充氣壓的調節,我們可以調整軟體膝關節結構的剛度,以應對不同程度的壓力。進一步地,通過對背面結構的折痕設計,結合正面折紙結構變形時兩側張開、上下壓縮的同步運動特點,使背面折紙結構在順應正面結構運動的同時產生由外凸向內凹的運動變化,從而進一步壓縮氣腔體積,模仿馬尾草髓腔褶皺受壓內凹的機制,進一步增強軟體假肢的抗壓能力。
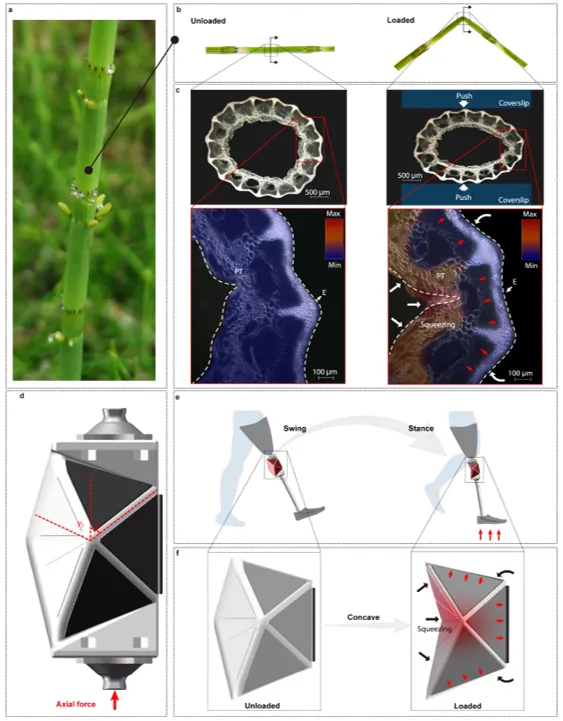
圖4. 仿馬尾草抗彎折機制的軟體結構設計
本研究采用通過對折紙結構折面部分的加固,可以有效約束折面的非必要形變,從而將形變誤差限制在折痕部分,由于折痕只占折紙結構很小的一部分,因此通過加固折面可以有效降低結構整體的非必要形變量,提高運動精度。
軟體膝關節假肢測試
通過實驗臺實驗,本研究先后對軟體膝關節假肢的氣動控制、瞬心軌跡擬合程度、多維沖擊吸收、承載能力、力矩輸出能力進行了測試。如圖5所示,結果表明,折紙結構可以模仿人體膝關節變轉動中心運動,軟體膝關節假肢可以在氣壓驅動下進行較為精準的運動,實際運動與理論計算接近,驅動帶寬滿足殘疾人快速行走的要求。軟體假肢面對不同方向的外部沖擊,都比剛性假肢具有更強的緩沖能力(可多吸收11.5%至17.3%的沖擊力)。所提出的軟體膝關節假肢可以在較低的預充氣壓下承載超過75kg的重量(其自重的250倍),并能主動輸出超過25Nm的伸膝力矩。
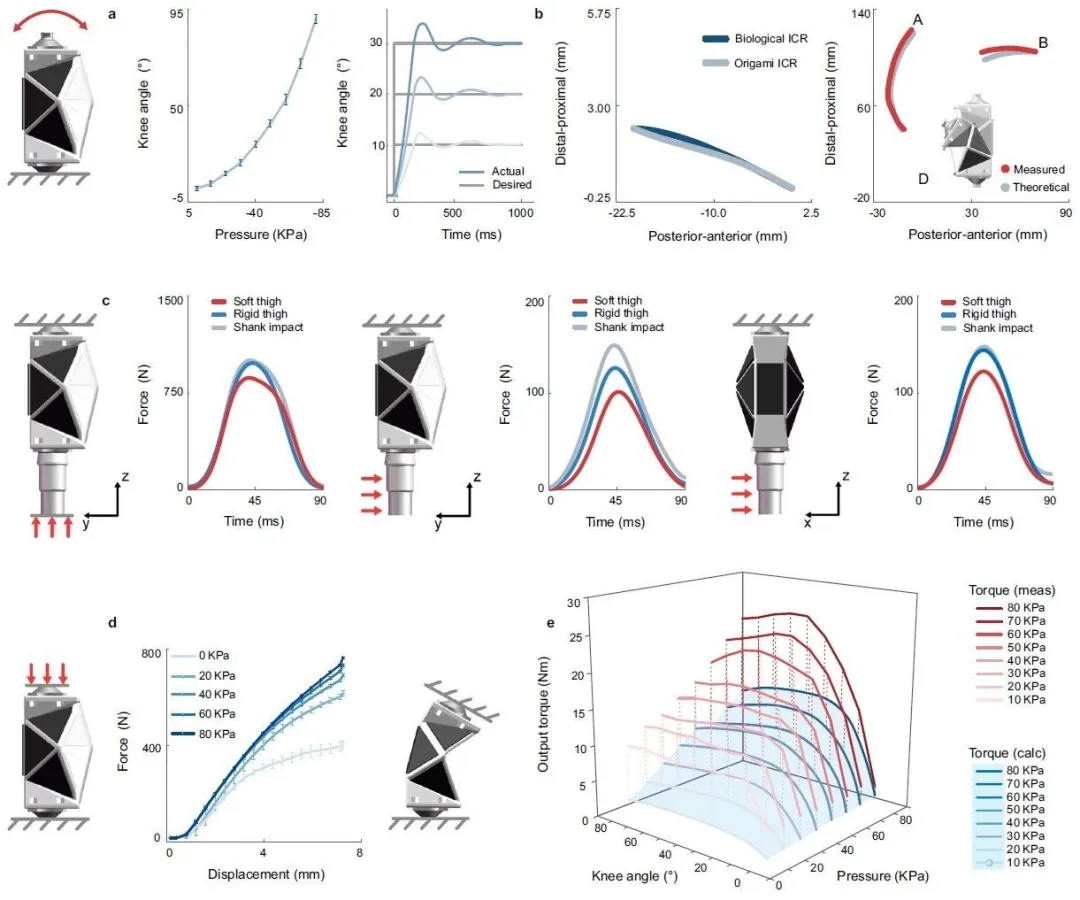
圖5. 實驗臺實驗結果
此外,本研究邀請三名殘疾人被試參加一系列行走實驗,如1 m/s和1.25 m/s跑步機行走、上、下15 cm臺階、上、下10°斜坡、跨越障礙等。圖6展示的是殘疾人分別穿戴軟體假肢和日常使用的剛性假肢在跑步機上以1 m/s和1.25 m/s的速度行走的實驗結果,實驗采集了殘疾人殘側和健側的關節角度、肌肉激活程度、足底壓力、假肢對地面沖擊力和振幅的的吸收,并進行了步態對稱性分析。結果表明,盡管殘疾人對軟體假肢不熟悉,仍可以穿戴軟體膝關節假肢以正常步速和較快步速進行行走,并具有更好的步態對稱性,殘疾人不僅更省力,受到的沖擊也更小,主觀上也認為行走時的舒適度更高。
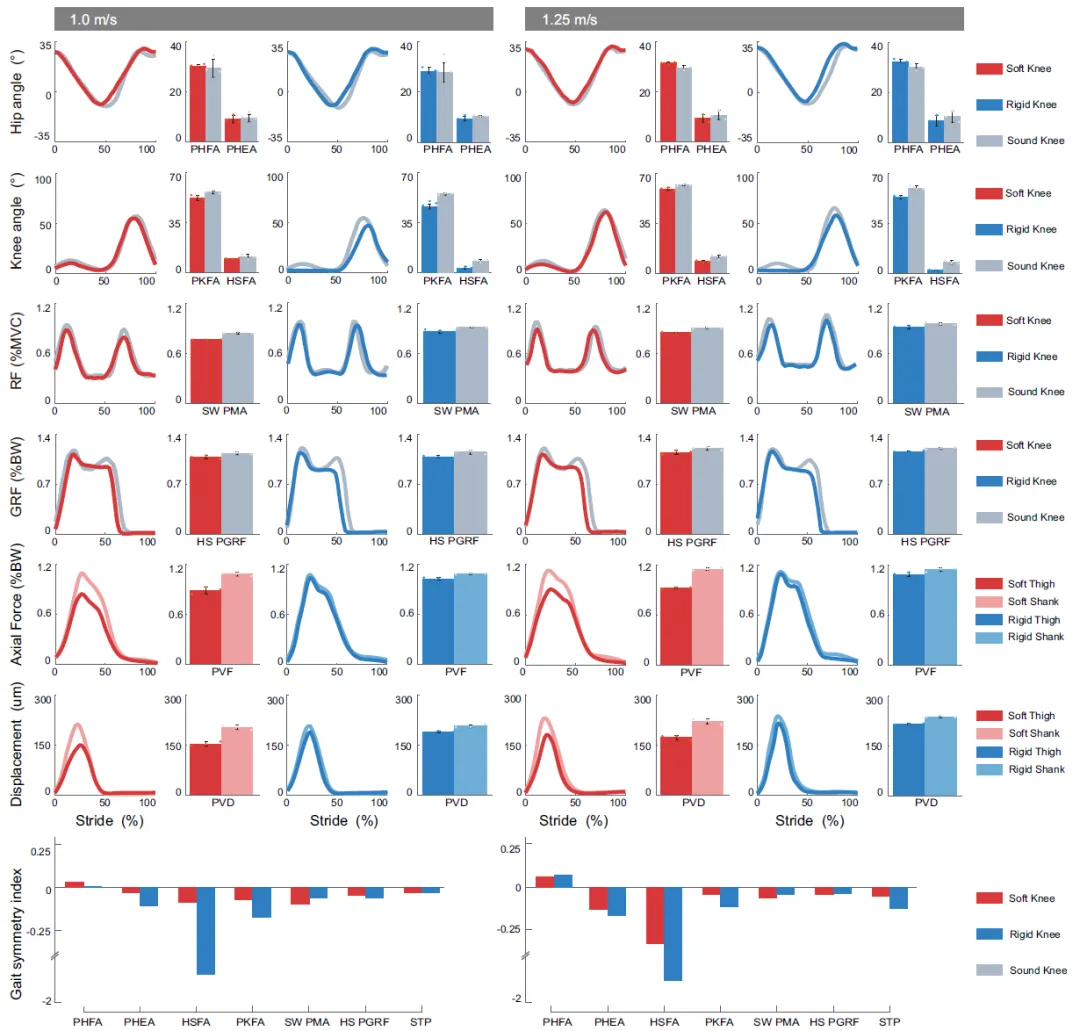
圖6. 殘疾人跑步機行走實驗結果
在多地形行走實驗中,本研究主要采集了殘疾人的關節角度變化數據,旨在驗證軟體假肢的多功能性。如圖7所示,實驗結果表明,軟體膝關節假肢可以支持殘疾人進行交替腿上、下樓梯/斜坡,并能夠連續跨越障礙物,假肢可以識別殘疾人的運動意圖并提供充分的運動范圍和力。
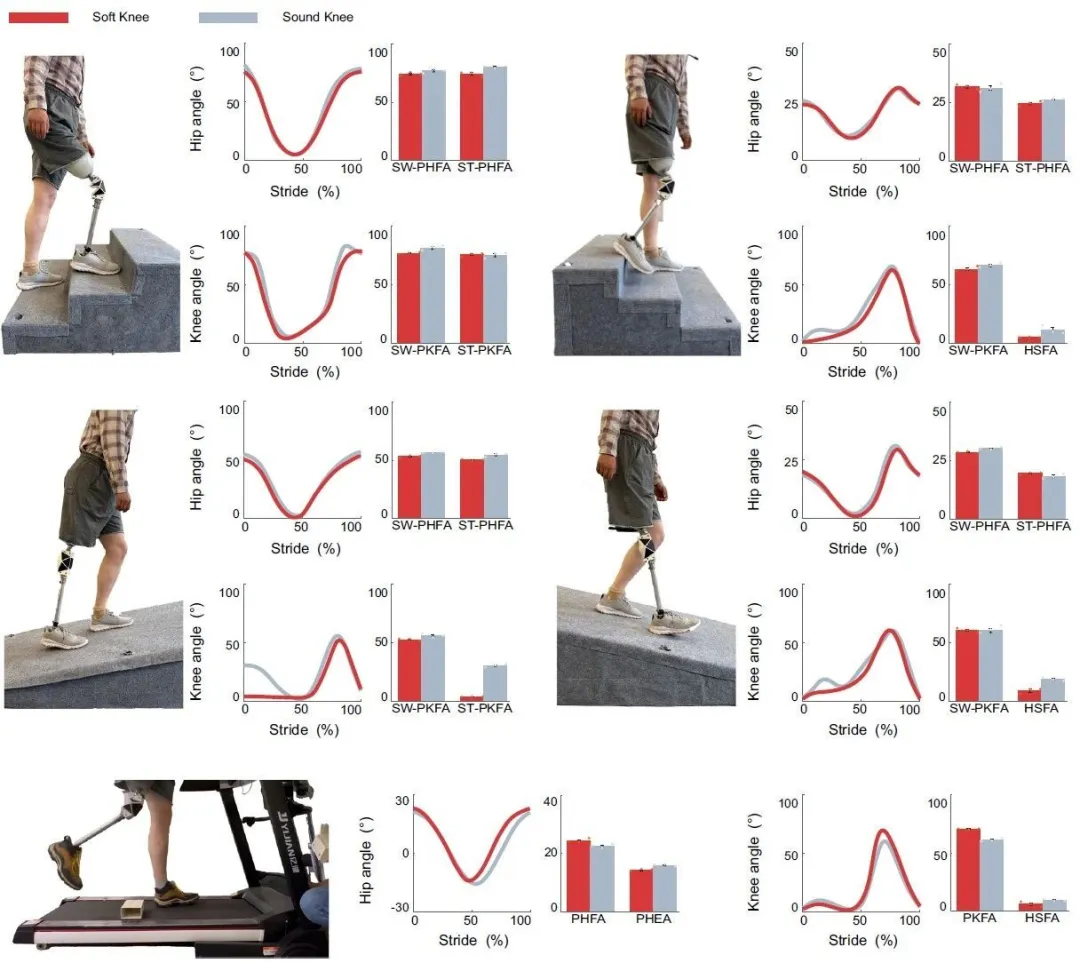
圖7. 殘疾人多地形行走實驗結果
本研究提出了首款軟體膝關節假肢,為下肢假肢的設計提供了全新的思路。假肢設計者和研究人員們可以不受傳統機械設計的限制,采用全新的設計方法設計假肢。適用于軟體下肢假肢應用場景的新材料、新驅動、新傳感的開發也將為軟體機器人的發展注入新鮮血液。基于3D打印等新制造方法的定制化下肢假肢制造也將成為研究熱點,快速且低成本的制造會加快技術迭代并降低研發門檻。研究人員們相信,軟體膝關節假肢的實現將會開啟一個全新的交叉研究領域。
該論文的第一作者為北京大學工學院博士生高思源,北京大學工學院王啟寧教授為唯一通訊作者。合作者包括康復大學楊承旭博士、北京大學工學院碩士生陳鴻汀、北京大學生命科學學院賀新強教授、北京大學工學院阮樂成博士。相關研究得到了國家自然科學基金委的資助。
① 凡本站注明“稿件來源:教育在線”的所有文字、圖片和音視頻稿件,版權均屬本網所有,任何媒體、網站或個人未經本網協議授權不得轉載、鏈接、轉貼或以其他方式復制發表。已經本站協議授權的媒體、網站,在下載使用時必須注明“稿件來源:教育在線”,違者本站將依法追究責任。
② 本站注明稿件來源為其他媒體的文/圖等稿件均為轉載稿,本站轉載出于非商業性的教育和科研之目的,并不意味著贊同其觀點或證實其內容的真實性。如轉載稿涉及版權等問題,請作者在兩周內速來電或來函聯系。